Raspberry Pi ROV
My name's Sam Groome. I'm an apprentice at an ROV manufacturer and a college student finishing my HND in electrical/electronic engineering.
I designed and built an ROV for my college project which was controlled with a Raspberry Pi for motor control, and an Odroid C1 for the webcam stream.
I've had so much fun creating this that I want to expand on it further. But let's start with some basic background on the project.
What's an ROV?
An ROV is a remotely operated vehicle and can be used by 'pilots' to navigate bodies of water where it might be to dangerous or not possible to send divers. The ROV can be equipped with tools and sensors to carry out tasks at great depths.
What have I accomplished so far?
My college project was a great success and laid out a foundation for future ROV developments.
The main feature of the ROV is the powerline adapters which are found commonly in your home and work off the AC voltages in the wall, giving the user the ability to get a wired ethernet connection around the house.
The same concept has been applied to my ROV with a powerline adapter connected to the laptop, and a mains cable running down to the Subsea powerline adapter, which is connected to the odroid. Giving me the ability to remote access and control the Odroid C1.
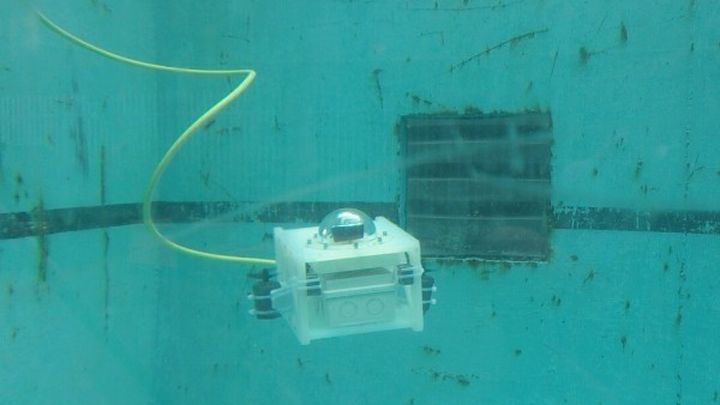
The ROV also has a 720P webcam for video. Contained within the acrylic dome you see on top of the ROV. It has 4 DC motors encased in acrylic tubing, the tubes are filled with a rubbery gel compound to keep the connections dry and away from the water.
There are two lateral thrusters, which are located at the back. This gives the pilot the ability to turn left and right on the spot, and two vertical thrusters to move the ROV up and down.
The yellow cable you see in the photo is what we call a tether or umbilical. It contains the wires from the surface junction box which run power and telemtry to the Subsea Odroid C1, the power line adapter and the motors.
What went wrong/right?
I conducted water tests up to 5 metres for 50 minutes and there were no problems with the operation of the ROV. The tether itself was a bit thick and affected the ability to fly but it's all I had to hand. This is something I addressed which I'll mention later on.
One of the propellors had a tendency to fly off the shaft as they were held on with an epoxy resin. I'll be using brushless motors in my next ROV though for more power and reliablity.
The webcam displayed great images and worked as expected, condensation became an issue over a long period of time inside the sealed dome which is something else I'll address.
Improvements I've made / plan to make
The first thing I needed to combat before investing any more of my own money into this was if I could get a two core tether working. (Long story short) After many (frustrating) nights I managed to get a program working on the Raspberry Pi 2 called USB Redirector.
The program allowed me to share the blue tooth dongle from my laptop, to the Raspberry Pi 2 over a powerline network. What does this mean? It means I don't need to run motor control from the surface anymore and it can all be contained inside an EPOD (electronics pod)
So i've managed to go from a twelve core cable down to a two core cable. This will make the ROV super easy to pilot as there'll be little drag on the tether.
I am working on controlling brushless motors with the Adafruit PWM top hat currently, I'll be using five of these motors, consisting of four laterals, giving me the ability to have vectored thrust. Meaning it can strafe side to side, turn on the spot, and have greater control in strong currents.
I'll also be adding some LED PCB boards which have an output of 100 Lumens, I did some tests on these in the dark and I can definitely say they're bright. This was just with one board and I've got four. They're powered by five volts and I could turn them off and on with a relay connected to the GPIO pins of the Raspberry Pi 2.
I'm also looking into the use of a pan and tilt module to place the webcam on, meaning I can turn this module instead of the ROV to look around.
I've also designed and partially built a 300 metre rated electronics pod, made out of PP (Poly-Propylene) which is what the chassis is also going to be made out of. It's a lightweight, very strong material which is ideal for use in water as it also has chemical resistance, doesn't corrode.
I hope you've enjoyed reading about my project and ideas, this is something I feel passionate about and look forward to any help and support I can recieve as this project expands and grows. I want to see a Raspberry Pi 300 metres underwater controlling an ROV. I think it would be truly amazing and revolutionairy in the way we think about manufacturing ROV's.
Thank you for any support you give, I look forward to keeping you all up to date in the future.
I designed and built an ROV for my college project which was controlled with a Raspberry Pi for motor control, and an Odroid C1 for the webcam stream.
I've had so much fun creating this that I want to expand on it further. But let's start with some basic background on the project.
What's an ROV?
An ROV is a remotely operated vehicle and can be used by 'pilots' to navigate bodies of water where it might be to dangerous or not possible to send divers. The ROV can be equipped with tools and sensors to carry out tasks at great depths.
What have I accomplished so far?
My college project was a great success and laid out a foundation for future ROV developments.
The main feature of the ROV is the powerline adapters which are found commonly in your home and work off the AC voltages in the wall, giving the user the ability to get a wired ethernet connection around the house.
The same concept has been applied to my ROV with a powerline adapter connected to the laptop, and a mains cable running down to the Subsea powerline adapter, which is connected to the odroid. Giving me the ability to remote access and control the Odroid C1.
The ROV also has a 720P webcam for video. Contained within the acrylic dome you see on top of the ROV. It has 4 DC motors encased in acrylic tubing, the tubes are filled with a rubbery gel compound to keep the connections dry and away from the water.
There are two lateral thrusters, which are located at the back. This gives the pilot the ability to turn left and right on the spot, and two vertical thrusters to move the ROV up and down.
The yellow cable you see in the photo is what we call a tether or umbilical. It contains the wires from the surface junction box which run power and telemtry to the Subsea Odroid C1, the power line adapter and the motors.
What went wrong/right?
I conducted water tests up to 5 metres for 50 minutes and there were no problems with the operation of the ROV. The tether itself was a bit thick and affected the ability to fly but it's all I had to hand. This is something I addressed which I'll mention later on.
One of the propellors had a tendency to fly off the shaft as they were held on with an epoxy resin. I'll be using brushless motors in my next ROV though for more power and reliablity.
The webcam displayed great images and worked as expected, condensation became an issue over a long period of time inside the sealed dome which is something else I'll address.
Improvements I've made / plan to make
The first thing I needed to combat before investing any more of my own money into this was if I could get a two core tether working. (Long story short) After many (frustrating) nights I managed to get a program working on the Raspberry Pi 2 called USB Redirector.
The program allowed me to share the blue tooth dongle from my laptop, to the Raspberry Pi 2 over a powerline network. What does this mean? It means I don't need to run motor control from the surface anymore and it can all be contained inside an EPOD (electronics pod)
So i've managed to go from a twelve core cable down to a two core cable. This will make the ROV super easy to pilot as there'll be little drag on the tether.
I am working on controlling brushless motors with the Adafruit PWM top hat currently, I'll be using five of these motors, consisting of four laterals, giving me the ability to have vectored thrust. Meaning it can strafe side to side, turn on the spot, and have greater control in strong currents.
I'll also be adding some LED PCB boards which have an output of 100 Lumens, I did some tests on these in the dark and I can definitely say they're bright. This was just with one board and I've got four. They're powered by five volts and I could turn them off and on with a relay connected to the GPIO pins of the Raspberry Pi 2.
I'm also looking into the use of a pan and tilt module to place the webcam on, meaning I can turn this module instead of the ROV to look around.
I've also designed and partially built a 300 metre rated electronics pod, made out of PP (Poly-Propylene) which is what the chassis is also going to be made out of. It's a lightweight, very strong material which is ideal for use in water as it also has chemical resistance, doesn't corrode.
I hope you've enjoyed reading about my project and ideas, this is something I feel passionate about and look forward to any help and support I can recieve as this project expands and grows. I want to see a Raspberry Pi 300 metres underwater controlling an ROV. I think it would be truly amazing and revolutionairy in the way we think about manufacturing ROV's.
Thank you for any support you give, I look forward to keeping you all up to date in the future.
Organizer
Sam Groome
Organizer